
14
六公司新聞
分類尼龍66差異化工業(yè)絲項目自動落筒系統(tǒng)1 .
貨物詳細技術(shù)性能描述
本設(shè)計方案中涉及產(chǎn)品,核心部件,元器件,原材料均采用成熟穩(wěn)定的國際知名品牌:
PLC選用1500西門子高度的故障安全型S7-1515F作為主控制器
低壓電氣件采用:施耐德、西門子、歐姆龍
檢測傳感器采用:SICK,歐姆龍,松下
機器人選用庫卡KUKA
產(chǎn)品輸送線和桁架機械手伺服電機與伺服控制器,減速機選用西門子
旋轉(zhuǎn)平臺采用西門子變頻器,電機選用SEW
工控機:西門子
觸摸屏:西門子
視覺系統(tǒng):康耐視
氣動部分:SMC
AGV小車:海康,主要部件P+F
軸承,絲杠:SKF
設(shè)計制造過程嚴格按相關(guān)行業(yè)標準執(zhí)行。
設(shè)備中所有使用的貨物均通過其他實際項目驗證,具備長期穩(wěn)定、可靠。
設(shè)備技術(shù)性能參數(shù)描述
桁架機械手HH-GYS01~ HH-GYS03
驅(qū)動模塊 X軸 推料軸 Z軸
行程 5200mm 1200mm 2000mm
重復(fù)精度 0.1mm 0.1mm 0.02mm
減速機 5:1 5:1 3:1
電機類型 伺服馬達 伺服馬達 伺服馬達
電機位置 左 左 頂部
額定相電壓 3相 3相 3相
導(dǎo)向裝置負載 21% 25% 21%
驅(qū)動負載 7% 6% 23%
軸負荷 0% 0% 45%
桁架機械手HH-XDS01
驅(qū)動模塊 X軸 推料軸 Z軸
行程 11500mm 1200mm 2000mm
重復(fù)精度 0.1mm 0.05mm 0.1mm
減速機 3:1 5:1 3:1
電機類型 伺服馬達 伺服馬達 伺服馬達
電機位置 左 左 頂部
額定相電壓 3相 3相 3相
導(dǎo)向裝置負載 21% 25% 21%
驅(qū)動負載 7% 6% 23%
軸負荷 0% 0% 45%
桁架機械手HH-XDS02
驅(qū)動模塊 X軸 Y軸 推料軸 Z軸 旋轉(zhuǎn)軸
行程 11500mm 4200mm 1200mm 2000mm 180度
重復(fù)精度 0.1mm 0.1mm 0.05mm 0.1mm 0.1度
減速機 3:1 3:1 5:1 3:1 3:1
電機類型 伺服馬達 伺服馬達 伺服馬達 伺服馬達 伺服馬達
電機位置 左 左 左 頂部 頂部
額定相電壓 3相 3相 3相 3相 3相
導(dǎo)向裝置負載 21% 21% 25% 21% 10%
驅(qū)動負載 7% 7% 6% 23% 18%
軸負荷 0% 20% 0% 45% 45%
工業(yè)絲絲餅輸送線HH-SSX01
滿足12個工位絲餅輸送前端配合機器人協(xié)作作業(yè)節(jié)奏。
細旦絲絲餅輸送線HH-SSX02
滿足8個工位絲餅輸送前端配合機器人協(xié)作作業(yè)節(jié)奏.
機器人
采用KR 60-3,KR60-3 就像是位行為藝家它形同拳頭的工作空間為應(yīng)用領(lǐng)域提供了節(jié)省空間的設(shè)備方案。
負荷 負荷 60千克
附加負荷 35 千克
工作范圍 最大作用范圍 2033毫米
軸數(shù) 6
重復(fù)精確度 <±0.20毫米
重量 665千克
安裝位置 可變
AGV
功能特性
?自主定位導(dǎo)航,采用慣性導(dǎo)航、視覺導(dǎo)航等技術(shù)實現(xiàn)精確定位。
?柔性運動控制,采用雙輪差速驅(qū)動,支持前進、后退、旋轉(zhuǎn)等運動控制,運動過程平滑柔順。
?智能電源管理,支持多等級電量閥值控制,低電量時自主充電,完成充電后自主返回工作。
?多重安全防護,支持前遠距離檢測,前近距離檢測,前碰撞檢測,前/后急停按鈕等多級安全防護,實現(xiàn)安全可靠的運動控制。
?大型貨物搬運,支持 1000kg 貨物舉升、搬運、旋轉(zhuǎn)、下放。
?設(shè)備狀態(tài)指示,通過三色指示燈、數(shù)碼管,提示電量、設(shè)備狀態(tài)等。
?無線網(wǎng)絡(luò)通信,支持 WIFI 網(wǎng)絡(luò)通信和無縫漫游,網(wǎng)絡(luò)覆蓋區(qū)域無障礙運行。
系統(tǒng)參數(shù)
尺寸(mm) 1120(L)890(W)300(H)
自重(kg) 350
最大舉升高度(mm) 60
額定負載能力(kg) 1000
額定運行速度(空載)(mm/s) 1000
額定運行速度(額定負載)(mm/s) 1000
額定加速度(空載)(mm/s2) 60
額定加速度(額定負載)(mm/s2) 300
導(dǎo)引定位精度(mm) ±10
停止角度精度(°) ±1
停止位置精度(mm) ±10
電池額定電壓(V) 48
電池容量(Ah) 30
充電循環(huán)次數(shù)(次) 完全充放電1500
額定工況下工作時間(h) 8
充電時間(h) 完全放電后充電時長≤1.5
激光避障 前置激光避障
碰撞條檢測 前置碰撞條檢測
急停按鈕 前/后急停按鈕
機器人路徑引導(dǎo)系統(tǒng):
采用康耐視DIS8402-max視覺檢測系統(tǒng),相機采用200萬像素智能相機系統(tǒng),DIS8402-MAX視覺引導(dǎo)系統(tǒng),包含:光源,鏡頭,相機,相機線材,光源控制器,相機采用Profinet方式通訊。
系統(tǒng)組成
按照提供的設(shè)備劃分:
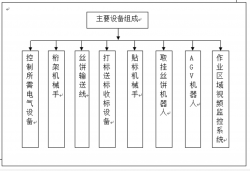
主要設(shè)備介紹:
控制所需電氣設(shè)備介紹
系統(tǒng)采用西門子TIA平臺,全集成自動化(TIA) —— 是落實數(shù)字化智能制造的第一步。
全集成自動化(TIA) 基于西門子豐富的產(chǎn)品系列和優(yōu)化的自動化系統(tǒng),遵循工業(yè)自動化領(lǐng)域的國際標準, 著眼于滿足先進自動化理念的所有需求, 并結(jié)合系統(tǒng)完整性和對第三方系統(tǒng)的開放性, 為各行業(yè)應(yīng)用領(lǐng)域提供整體的自動化解決方案。 全集成自動化以一致的軟件和硬件接口,可實現(xiàn)與運營層、 管理層數(shù)據(jù)的無縫集成。

●總控制器采用西門子1500系列中CPU 1515F-2 PN,該控制器通過了EN61508(電氣功能性安全標準),符合IEC62061中的SIL 3級安全應(yīng)用標準,以及ISO 13849中PL e級安全應(yīng)用標準。指令執(zhí)行時間:位運算30ns,字運算36ns,浮點運算192ns,集成100Mbps RJ-45以太網(wǎng),最大支持32G裝載存儲器(SIMATIC存儲卡)
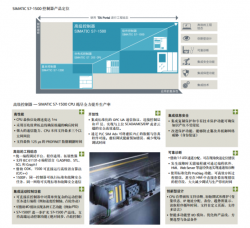
控制器產(chǎn)品定位
●現(xiàn)場采用西門子觸摸屏SIMATIC HMI KTP900 BASIC
9” TFT 顯示屏,800 x 480 像素,64K 色;按鍵和觸摸操作,8 個功能鍵;1 x PROFINET,1 x USB

觸摸屏
實際項目中,進行HMI 操作面板與 SIMATIC PLC 之間的時鐘同步組態(tài)。解決多個HMI 操作面板和 SIMATIC 控制器等組件在同一工廠工作時具有相同時間。
●PLC+HMI+KUKA機器人
SIMATIC S7-1500 控制器和 KUKA 工業(yè)機器人通過 PROFINET 連接進行通信。SIMATIC 控制器和機器人通過此連接完成所有命令和狀態(tài)信息交換。
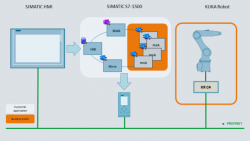
機器人與PLC高度集成圖
采用并聯(lián)柜方式,與MCC柜組合安裝。產(chǎn)品參數(shù)如下:
材料 箱體架:鋼板,1.5mm
頂蓋:鋼板,1.5mm
門:鋼板,2.0mm
后壁:鋼板,1.5mm
底板:鋼板,1.5mm
安裝板:鋼板,3.0mm
表面 門,頂蓋和后壁,箱體架:噴塑,安裝板和底板:鍍鋅
顏色 RAL 7035
防護等級 IP55
尺寸 寬度:800mm
高度:2200mm
深度:600mm
安裝板 寬度:699mm
高度:2096mm
重量 194kg(未安裝電氣件情況下)
●MCC柜
MCC(Motor Control Center)柜柜體同PLC柜,與PLC柜并聯(lián)安裝。管理現(xiàn)場設(shè)備的動力電源。
●工控機(工程師站)
安裝博圖TIA V14.0軟件與WINCC V7.4組態(tài)軟件,編輯PLC程序,維護控制系統(tǒng)。
按照系統(tǒng)功能劃分:
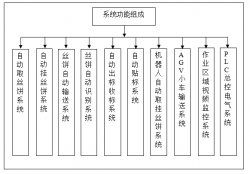
整體設(shè)計總圖
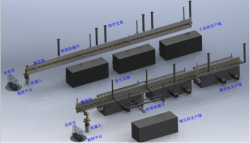
自動落筒系統(tǒng)整體示意圖
系統(tǒng)整體工作流程
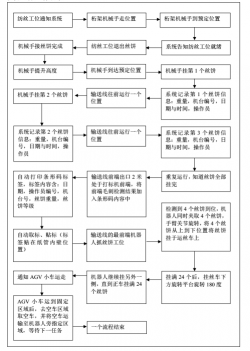
AGV小車將裝有絲餅的運絲車運輸至車間待檢測區(qū)后,再由人工曬選,后續(xù)再由倉儲系統(tǒng)取走。(倉儲系統(tǒng)不在本系統(tǒng)規(guī)劃中)
0
評論